
张文学
时间:2024-04-18 来源: 作者: 访问量:

简介
张文学,工学博士,硕士研究生导师,机械工程学院,机械设计制造及其自动化系。毕业于哈尔滨工业大学航天学院控制科学与工程系,美国伊利诺伊大学香槟分校(UIUC)联合培养博士。2023年加入机械学院“建筑机器人及智能装备创新团队”。
教育工作经历
2023.1-至今 河北工业大学,机械工程学院,讲师
2018.10-2020.10 伊利诺伊大学香槟分校,协调科学实验室,联合培养博士,导师:Dusan M. Stipanovic
2017.9-2022.10 哈尔滨工业大学,控制科学与工程,博士,导师:周荻
2015.9-2017.7 哈尔滨工业大学,控制工程,硕士,导师:吴爱国
2011.9-2015.7 燕山大学,自动化,学士
研究方向
机器人的运动控制、无人驾驶汽车的安全导航,多智能体的协同控制与避障控制、分布式控制与系统安全性验证、非线性系统的稳定性分析和镇定、飞行器的导航制导与控制。
研究成果
以第一作者或通讯作者在Automatica、Journal of Franklin Institute、IET Control Theory & Applications, Journal of Intelligent & Robotic Systems等期刊发表SCI论文。
主持河北省重点研发计划项目“基于自适应跟踪的管道全位置自动氩孤焊机器人关键技术研究与应用示范”,项目编号23311806D。参与美国国家自然科学基金项目“NRI: ASPIRE: Automation Supporting Prolonged Independent Residence for the Elderly (辅助老年人长期独立居住的自动化研究)”,项目编号1528036,承担系统稳定性分析与避障控制设计。参与美国农业部项目“NRI: COLLAB: Multi-Vehicle Systems for Collecting Shadow-Free Imagery in Precision Agriculture (精准农业中收集无阴影图像的多智能体系统研究)”,子项目编号1020285,承担无人机和地面机器人的协同控制和避障控制设计。参与国家自然科学基金面上项目“对抗强博弈机动目标过载饱和约束最优滑模制导律研究”,课题编号: FC61773142. 承担过载饱和约束最优滑模制导律设计。
研究方向简介
(1)无人驾驶汽车安全控制(与伊利诺伊大学香槟分校和北卡罗来纳州立大学联合项目):
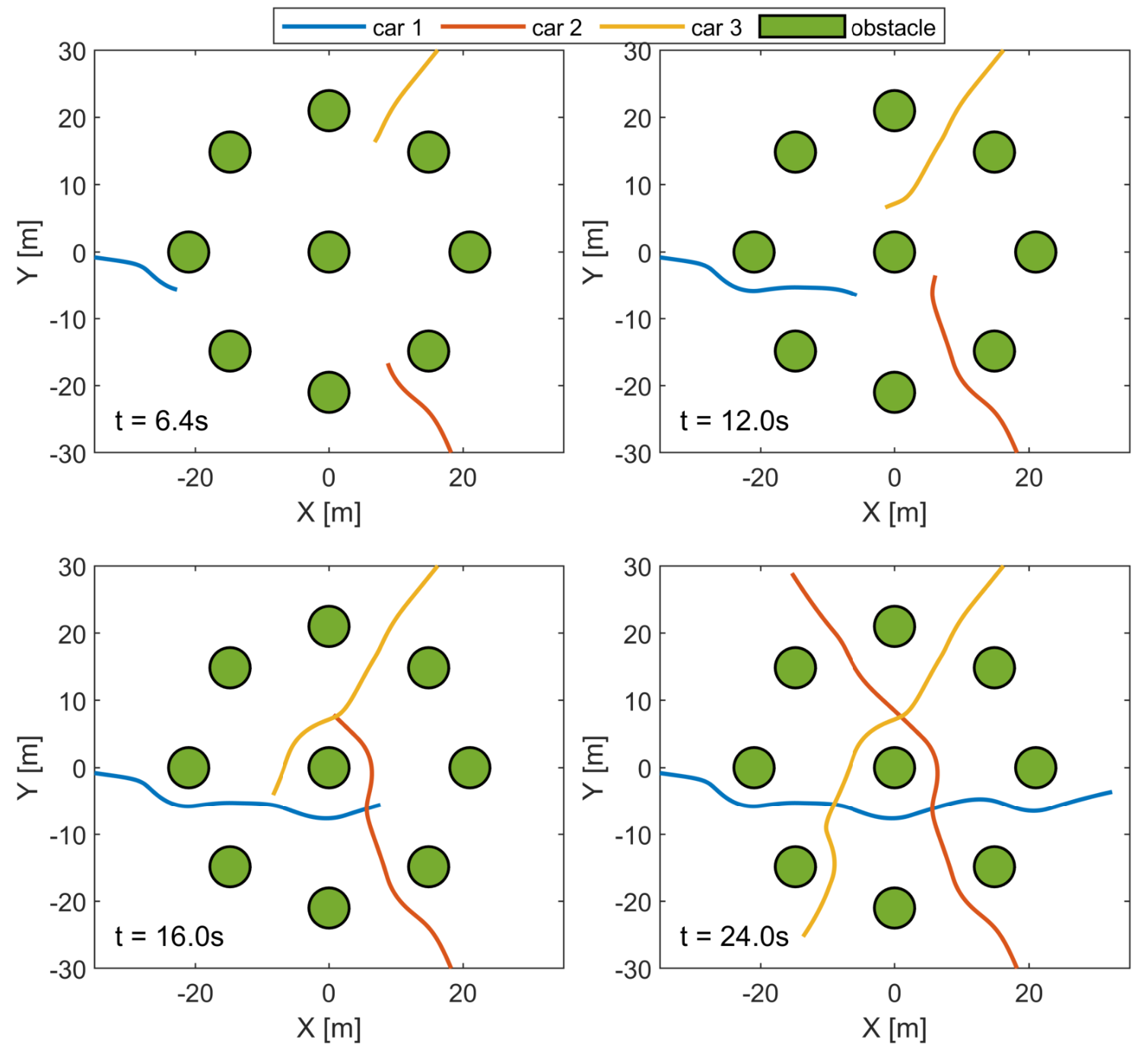
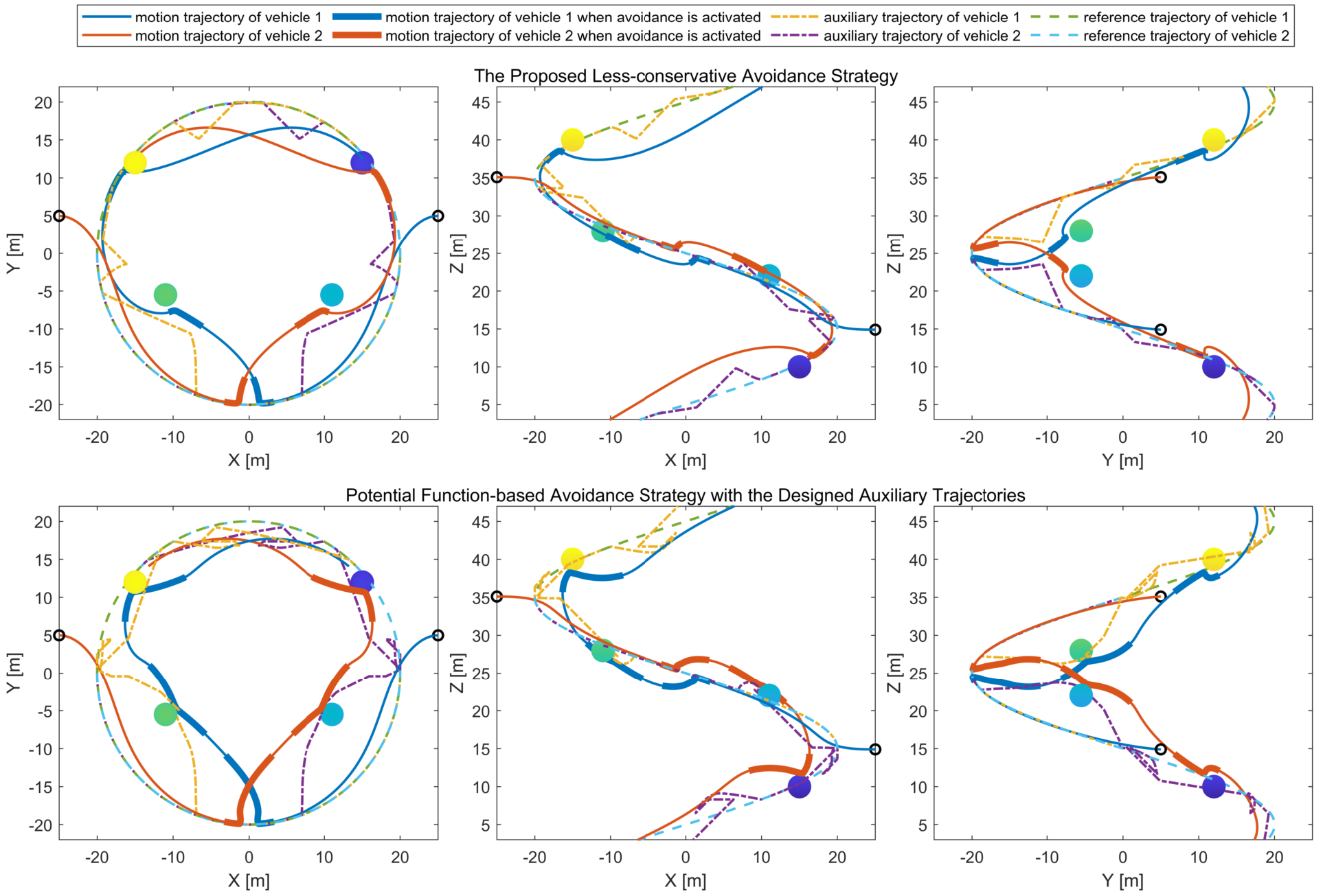
以城市道路交通中的无人驾驶汽车为研究对象,针对当前避障决策过于保守和实时性差的问题,提出一种既精确考虑非完整约束,又具备高度实时性且避免过度保守的避障控制方案。针对信号灯路口建立非线性交通优化模型,以最小化行驶时间和最大程度提升乘坐舒适度为目标,规划车辆的最优或次优期望轨迹,构建交替方向乘子法求解算法;构建全新的广义距离函数和碰撞风险评估函数,提出基于碰撞风险函数变化率的去保守化的解析型的避障决策方案;针对非完整约束的前轮转向和四轮转向车辆,考虑外部有界扰动和有界检测误差,结合跟踪任务和避障决策,构建收敛向量,设计安全跟踪控制律;针对含有可拆卸车厢的级联型系统,考虑非完整约束和转角限制,解决不同车辆间的避障问题和级联型系统内部的自避障问题,结合跟踪任务和级联关系,提出安全跟踪控制律。本项目为无人驾驶技术的安全保障奠定了理论基础,有望推动该领域实现更深入的突破和更广泛的应用。



(2)飞行器的安全导航与机-臂协同控制


(3) 级联型系统控制

(4)多智能体的跟踪与避障控制
(5)迭代学习和神经网络(人工智能方向)
联系邮箱:
每年招收2名硕士研究生,欢迎具有数学、自动化、机械、计算机、航空航天等背景的本科生报考。所在建筑机器人团队现有科研用房面积 3400 平米,专用实验场地450平米。团队现有轮式自主移动机器人、四轮转向和六轮转向移动机器人、高速相机、深度相机、三维激光跟踪仪、高性能工作站等实验设备。可推荐哈工大、伊利诺伊大学香槟分校(QS世界大学排名75)、北卡州立大学等北美高校攻博。